




Planung und Realisierung von Kleinwindkraftanlagen für das Micro Smart Grid auf dem EUREF Campus in Berlin Schöneberg
1. Juli 2015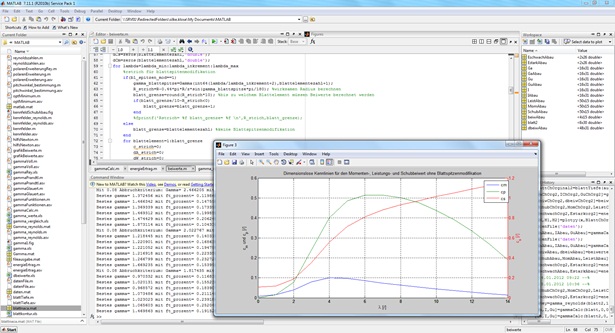
Kennfeldberechnung von Rotorblättern mit ABAUKAS
1. Juli 2015Entwicklung und Aufbau des Hardware-in-the-Loop Prüfstands PHil zur Untersuchung mechanischer Pitchsysteme für Kleinwindenergieanlagen
Projektzeitraum
01.04.2011 - 30.09.2011
Kleinwindenergieanlagen (KWEA) mit geringer Nennleistung im Bereich kleiner 100 kW gewinnen in der dezentralen Energieversorgung zunehmend an Bedeutung. Für deren wirtschaftlichen Betrieb sind aufwändige mechatronische Regelsysteme zur Pitch-Regelung zu kostenintensiv. Als günstige Alternative bieten sich bei kleinen Anlagen mechanische Lösungen zur Leistungsbegrenzung an. Der Aufbau des Prüfstands PHiL befähigt uns, mechanische aber auch elektromechanisch geregelte Pitch-Systeme von KWEA experimentell zu untersuchen und die Funktion der Regler zu prüfen. Weiterhin soll der Vergleich der Messwerte vom Prüfstand mit realen Betriebsdaten von Kleinwindenergieanlagen die Frage nach der Anwendbarkeit gängiger Theorien zur Rotorblattauslegung für kleine Anlagen beantworten.
Kleinwindenergieanlagen (KWEA) mit geringer Nennleistung im Bereich kleiner 100 kW gewinnen in der dezentralen Energieversorgung zunehmend an Bedeutung. Für deren wirtschaftlichen Betrieb sind aufwändige mechatronische Regelsysteme zur Pitch-Regelung zu kostenintensiv. Als günstige Alternative bieten sich bei kleinen Anlagen mechanische Lösungen zur Leistungsbegrenzung an. Der Aufbau des Prüfstands PHiL befähigt uns, mechanische aber auch elektromechanisch geregelte Pitch-Systeme von KWEA experimentell zu untersuchen und die Funktion der Regler zu prüfen. Weiterhin soll der Vergleich der Messwerte vom Prüfstand mit realen Betriebsdaten von Kleinwindenergieanlagen die Frage nach der Anwendbarkeit gängiger Theorien zur Rotorblattauslegung für kleine Anlagen beantworten.
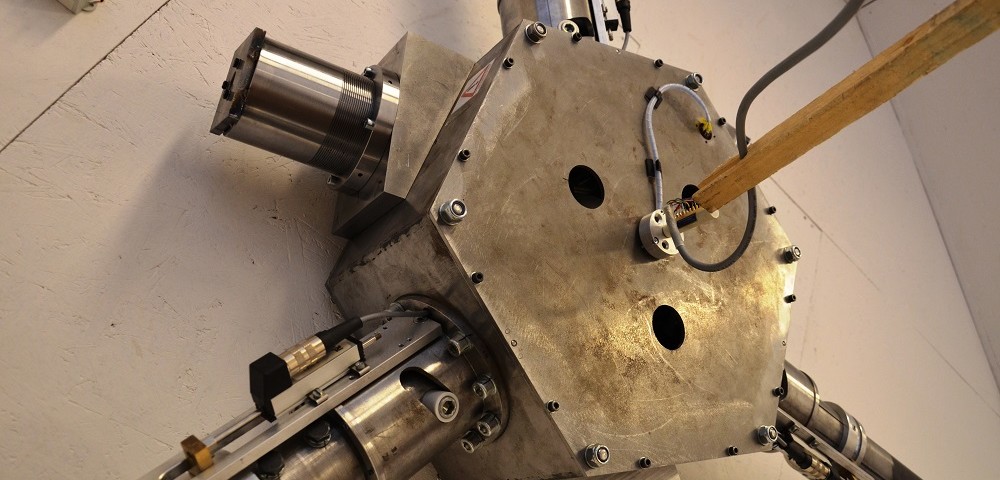
Der Prüfstand wird durch einen Drehstrom-Asynchronmotor angetrieben und kann den Prüfkörper auf eine Drehzahl von bis zu 400 1/min beschleunigen.
Das Messsystem umfasst eine Bachmann SPS, Positionssensoren für die Messung der Pitch-Winkel, den Inkrementalgeber des Motors zur Bestimmung der Motordrehzahl und ein Lasersystem zur Validierung der Rotordrehzahl. Des Weiteren können Kameras an den Blattwurzeln für eine Visualisierung der arbeitenden Pitchmechanik angebracht werden.
Die Ansteuerung des Prüfstands erfolgt durch am Institut programmierte MATLAB-Modelle, die auf die SPS geladen werden. Dies ermöglicht im Rahmen des Hardware-in-the-Loop-Prinzips (HiL) die reale Anströmung des Rotors zu simulieren und das Verhalten des Pitch-Systems in Abhängigkeit von der vorgegebenen Windgeschwindigkeit zu untersuchen.
Die Überwachung der Versuche wird durch eine graphische Oberfläche am PC realisiert. Hier werden sämtliche Messdaten, sowie die Parameter zur Ansteuerung visualisiert und Messwerte aufgezeichnet.

